 Innovation &Technology
Innovation &Technology R & D team
HSASK has a highly specialized R&D team that is proficient in advanced technologies and leading engineering practices and can quickly respond to market demands and technical challenges.

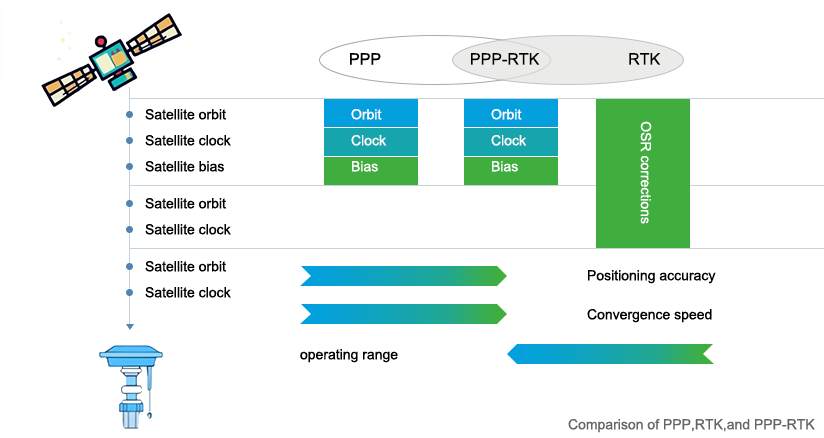
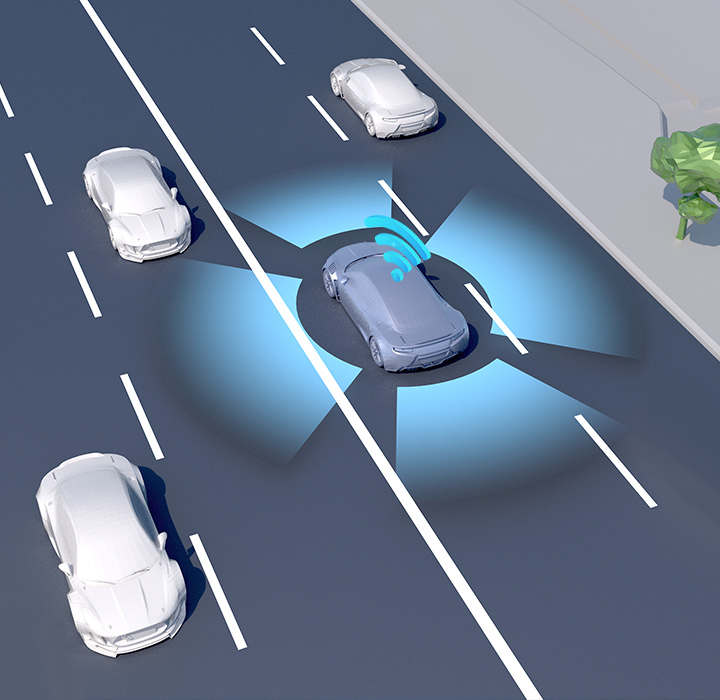
The HSASK automotive integrated navigation system uses PPP-RTK and IMU to achieve high-precision positioning. Since PPP-RTK integrates low-orbit satellites and ground reference stations to achieve positioning, it does not rely on the support of base stations and networks and can perform single-point positioning at any location and time. This makes PPPRTK independent and flexible and suitable for various environments. and application scenarios, including cities, rural areas, remote areas, etc. PPP-RTK has strong anti-interference ability and can reduce positioning errors through multi-path suppression and processing of surrounding environment interference. This allows PPP-RTK to still provide excellent performance in complex signal environments and harsh weather conditions around the world. Reliable centimeter-level positioning performance.
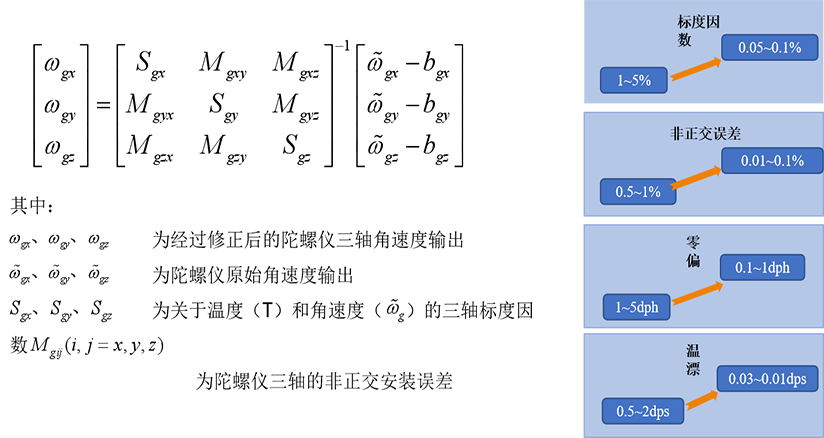
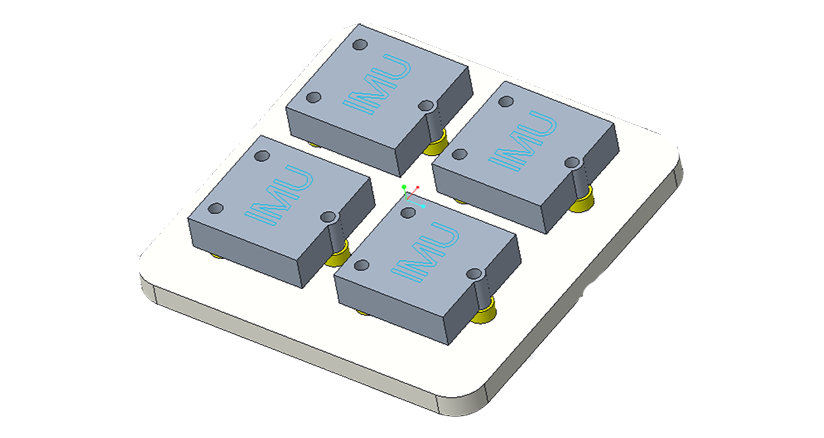
At the same time, considering that satellite positioning signals are easily lost or interfered with in scenes such as urban canyons, tunnels, and parking lots, high-precision MU is used to achieve accurate trajectory estimation. Our company uses unique IMU calibration technology to enable the IMU to show the best performance under working conditions, reduce the impact of non-orthogonal errors, reduce the impact of zero bias and temperature drift, and after correction, the track estimation performance can be improved by 10 times.
The high-precision integrated navigation and positioning system adopts the extended Kalman filter algorithm, adopts the vehicle motion constraint model, and uses the vehicle speed signal extracted from the CAN bus to achieve multi-source sensor signal fusion positioning, providing high-precision positioning covering the entire scene for intelligent driving, ensuring driving Safety.